MANIPULADOR DE COORDENADAS ESFERICAS PARA ORIENTAR CAMARAS DE VISION Y OTROS DISPOSITIVOS.
Manipulador de coordenadas esféricas para orientar cámaras de visión y otros dispositivos.
El manipulador comprende un arco (1) sobre el que va montado deslizantemente un carro motorizado (2) portador de una cámara (3) de visionado de un objeto situado en un soporte giratorio (5) montado en una plataforma horizontal (6), de manera que dicha cámara podrá posicionarse fácilmente alrededor del objeto en análisis de acuerdo con las coordenadas esféricas precisas, en cuanto a los ángulos de rotación e inclinación, siendo el radio físico constante en todo momento.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200901979.
Solicitante: DESARROLLOS DE SISTEMAS AVANZADOS, S.L.
Nacionalidad solicitante: España.
Inventor/es: HERNANDEZ,Charles-andres, ALGECIRAS ALVAREZ,Agustin.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G02B7/00 FISICA. › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › Monturas, medios de regulación o uniones estancas a la luz para elementos ópticos.
- G03B17/00 G […] › G03 FOTOGRAFIA; CINEMATOGRAFIA; TECNICAS ANALOGAS QUE UTILIZAN ONDAS DISTINTAS DE LAS ONDAS OPTICAS; ELECTROGRAFIA; HOLOGRAFIA. › G03B APARATOS O DISPOSITIVOS PARA HACER FOTOGRAFIAS, PARA PROYECTARLAS O VERLAS; APARATOS O DISPOSITIVOS QUE UTILIZAN TECNICAS ANALOGAS UTILIZANDO ONDAS DIFERENTES DE LAS ONDAS OPTICAS; SUS ACCESORIOS (partes ópticas de estos aparatos G02B; materiales fotosensibles para la fotografía o procedimientos fotográficos G03C; aparellaje para el tratamiento de materiales fotosensibles después de la exposición G03D). › Partes constitutivas de aparatos o cuerpos de aparatos; Sus accesorios (parasoles o capuchones G03B 11/04).
Descripción:
Manipulador de coordenadas esféricas para orientar cámaras de visión y otros dispositivos.
Objeto de la invención
La presente invención se refiere a un manipulador de coordenadas esféricas previsto para llevar a cabo la orientación de una cámara de visión o incluso de cualquier otro tipo de aparato o dispositivo que se quiera orientar convenientemente.
El objeto de la invención es proporcionar un manipulador de estructura sencilla, eficaz en su función y de máxima y probada eficacia, pudiendo definir su control de posicionamiento directamente desde lo que son unas coordinadas esféricas con una reducción del número de ejes de movimiento necesarios para cumplir dicho fin.
Antecedentes de la invención
En la actualidad, la automatización de procesos industriales requiere el posicionamiento y manipulación de forma precisa y fiable de determinado tipo de dispositivos, como pueden ser cámaras de visión, de manera tal que esa manipulación y posicionamiento se suele realizar mediante robots de seis ejes, robos "escara" o robots cartesianos.
Ahora bien, en algunas aplicaciones los manipuladores o robots estándar están dotados de un número de ejes superior al necesario, presentando otras veces ejes con movimientos limitados e incluso no adecuados para coordenadas esféricas.
Por consiguiente, cuando el movimiento es esencialmente esférico para llevar a cabo el posicionamiento de determinados dispositivos tales como cámaras de visión, los robots o manipuladores existentes son complejos y no están convenientemente adaptados a las necesidades concretas requeridas.
Descripción de la invención
El manipulador que se preconiza ha sido concebido para resolver la problemática anteriormente expuesta, ya que el mismo se centra en configurar y adaptar un manipulador mas simple para aplicaciones donde los movimientos son principalmente esféricos en su naturaleza, de manera que la consecuente disminución de complejidad facilita el uso del manipulador, reduciendo su coste de forma significativa.
Mas concretamente, el manipulador de la invención se constituye a partir de un arco montado con carácter basculante en sentido de giro, entre 0º y 90º preferentemente, sobre una plataforma horizontal en la que se ha previsto un soporte giratorio para el objeto que se pretende visionar, con la particularidad de que sobre ese arco va montado un carro motorizado que es deslizante por la pista establecida al efecto en el carro, estando ese carro dotado de la cámara de visión cuyo enfoque y zoom óptico corresponden al eje radial establecido entre la propia cámara y el objeto a visionar.
El soporte giratorio para el objeto a visionar está dotado de un dispositivo encoder para posicionar el propio soporte con precisión.
Por otro lado se ha previsto que la plataforma horizontal sobre la que está dispuesto el soporte giratorio anteriormente comentado y en un extremo opuesto articulado el arco constitutivo de la pista de rodadura o deslizamiento para el carro motorizado, se complemente con unas patas plegables/desplegables, que giran sobre un eje y se pliegan por debajo de la propia plataforma horizontal.
Igualmente, el arco se pliega hacia la mesa horizontal, pivotando sobre el eje de articulación del mismo, de manera que mediante un sistema de bloqueo cargado a muelle, el arco se fija en dos posiciones correspondientes a: una posición de despliegue prevista para el funcionamiento del mismo, y otra posición de pliegue para ocupar menos volumen y que corresponderá lógicamente a la de reposo.
El manipulador comentado presenta sus componentes referidos a los ejes principales correspondientes a las coordenadas esféricas cuyas variables dependen del ángulo de rotación acimutal y el ángulo de inclinación cenital, siendo éste el eje que se corresponde con el arco de deslizamiento del carro motorizado, mientras que el ángulo de rotación acimutal se corresponderá con la plataforma sobre la que monta y gira el soporte para el objeto a visionar.
Descripción de los dibujos
Para complementar la descripción que seguidamente se va a realizar y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
La figura 1.- Muestra los ejes correspondientes a las coordenadas esféricas en la que están establecidos los ejes principales del manipulador de la invención.
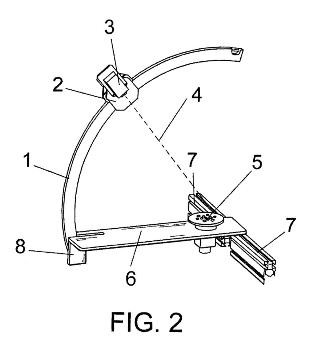
La figura 2.- Muestra una representación según una perspectiva del propio manipulador realizada de acuerdo con el objeto de la invención.
La figura 3.- Muestra una variante de realización práctica de la invención, vista en perfil, en el que la plataforma horizontal que sirve de soporte al arco y a la mesa de giro de la figura 2, es sustituida por una plataforma superior sobre la que se establecen los medios de rotación horizontal en el eje "θ" (Theta) de dicho arco.
Realización preferente de la invención
Como se puede ver en las figuras referidas, y haciendo alusión concretamente a la figura 1, el manipulador de la invención está previsto para realizar movimientos adecuados para coordenadas esféricas, siendo sus ejes servo-asistidos y logrando un posicionamiento preciso, de manera que los ejes principales coinciden directamente con las coordenadas esféricas, cuyas variables son:
- Ángulo de rotación o acimutal "θ" (Theta).
- Ángulo de inclinación cenital "Φ" (Phi).
- Y en donde "r" es la distancia radial al centro del sistema de coordenadas.
En la figura 2 puede observarse como el manipulador propiamente dicho comprende un arco (1) que corresponde al eje "Φ" (Phi), de manera que en ese arco (1) se posiciona y desliza un carro motorizado (2) provisto de un mecanismo de traslación mediante correas dentadas o cadena y piñón, no representados, y sobre cuyo carro motorizado (2) va montada una cámara de visión (3), cuyo enfoque y zoom óptico componen el eje radial (4), que no es otra cosa que el eje "r" representado en la figura 1, y cuyo eje radial (4) es el establecido entre la comentada cámara de vídeo (3) y el objeto a visionar y dispuesto sobre un soporte giratorio (5) montado sobre una plataforma horizontal (6), estando ese soporte giratorio (5) dotado de un dispositivo encoder para posicionar aquel con precisión.
El extremo de las coordenadas esféricas se sitúa a una altura perpendicular sobre el centro de giro del soporte (5), girando éste de 0º a 360º y exponiendo todo el perímetro del objeto a visionar o manipular, no representado, que se coloca sobre el mismo.
El arco (1) útil del eje "Φ" (Phi) es de al menos 90º, permitiendo el acceso radial a la totalidad del hemisferio superior, de manera que tal configuración con mayor longitud de arco permitirá el acceso a la parte inferior.
El manipulador se complementa además con una pareja de patas plegables (7) que giran sobre un eje y se pliegan por debajo de la plataforma horizontal (6), mientras que el arco (1) que compone el eje "Φ" (Phi) mencionado al principio, también se pliega hacia la plataforma horizontal (6), pivotando sobre el eje (8) establecido al efecto, tal y como se representa en la figura 2.
Mediante un sistema de bloqueo cargado a muelle no representado, el arco (1) se fija en dos posiciones, una correspondiente a la posición de despliegue para el funcionamiento del manipulador, y otra que corresponde a la posición de plegado para ocupar menos volumen y que lógicamente corresponde a la posición de reposo.
De acuerdo con una segunda variante de realización de la invención, la mostrada en la figura 3, la plataforma horizontal (6) podrá ser sustituida por una plataforma horizontal y superior (6'), en la que se establece un motor eléctrico (5') cuyo vástago está asociado al arco (1), llevándose a cabo a través de dicho motor el posicionamiento de la cámara de visión (3) en función de la coordenada esférica correspondiente al ángulo de rotación o acimutal "θ" (Theta), pudiendo determinar dicha plataforma horizontal y superior (6') la base superior de un bastidor (9), dotado de una superficie de análisis (10) sobre la que actuará el dispositivo de la invención, y sobre la que se establecerá el objeto (11) a comprobar.
Reivindicaciones:
1. Manipulador de coordenadas esféricas para orientar cámaras de visión y otros dispositivos, en función de un radio (r), un ángulo de rotación acimutal "θ" (Theta), y un ángulo de inclinación cenital "Φ" (Phi), se caracteriza porque está constituido a partir un arco (1) determinante del eje "Φ" (Phi), a lo lago del cual es desplazable un carro (2) deslizante por una pista establecida en dicho arco (1), carro dotado de medios de sustentación de la cámara de visión (3) o elemento de que se trate, habiéndose previsto que dicho arco (1) sea desplazable angularmente, en correspondencia con el ángulo de rotación acimutal "θ" (Theta) a través de un soporte giratorio (5), al cual se asocia por medio de una plataforma horizontal (6).
2. Manipulador de coordenadas esféricas para orientar cámaras de visión y otros dispositivos, según reivindicación 1ª, caracterizado porque se incluyen medios de movimiento establecidos mediante servo-ejes para un posicionamiento preciso, permitiendo manipular o visualizar de forma radial el objeto situado sobre el soporte giratorio (5).
3. Manipulador de coordenadas esféricas para orientar cámaras de visión y otros dispositivos, según reivindicaciones anteriores, caracterizado porque el soporte giratorio (5) va montado sobre una plataforma horizontal (6) bajo la cual se han previsto además dos patas plegables (7) alrededor de un eje común, estando el arco (1) montado pivotantemente sobre un eje (8) en correspondencia con la plataforma horizontal (6), en una zona opuesta a la de ubicación del soporte giratorio (5).
4. Manipulador de coordenadas esféricas para orientar cámaras de visión y otros dispositivos, según reivindicación 1, caracterizado porque opcionalmente el arco (1) en lugar de relacionarse con una mesa de giro ( 5) sobre una plataforma horizontal (6) lo hace con una plataforma horizontal y superior (6'), en la que se establece un motor eléctrico (5') cuyo eje "θ" (Theta) está asociado al arco (1) propiamente dicho, plataforma superior (6') integrada en un bastidor (9), dotado de una superficie sobre la que se establece el objeto (11) a analizar.
Patentes similares o relacionadas:
Portafiltros Cónico Escalonado, del 29 de Julio de 2020, de BARCO ANGELINA, Ivan: 1. El Portafiltros cónico escalonado se caracteriza por estar formado 2 piezas. Una de las piezas es una tapa con forma hexagonal exteriormente y circular interiormente. […]
Ensamblado de cámara y dispositivo electrónico, del 15 de Julio de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un ensamblado de cámara adaptado para instalarse en un dispositivo electrónico , que comprende: un módulo de cámara ; un motor ; y un módulo […]
Técnicas para enfocar automáticamente una cámara digital, del 18 de Marzo de 2020, de QUALCOMM INCORPORATED: Un dispositivo de comunicación inalámbrica configurado para comunicaciones inalámbricas, el cual comprende: una memoria configurada para […]
Dispositivo de obtención de imágenes de apertura múltiple, sistema de imagen y procedimiento para la detección de una zona de objeto, del 4 de Septiembre de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Dispositivo de obtención de imágenes de apertura múltiple (11; 1000; 2000; 3000; 4000; 4000'; 5000; 6000) con: al menos un sensor de imagen (12; […]
Dispositivo con un dispositivo de imagen de apertura múltiple, procedimiento de fabricación del mismo y procedimiento de detección de un campo visual completo, del 31 de Julio de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Dispositivo con: una carcasa ; y un dispositivo de imagen de apertura múltiple que […]
Conjunto de tarjeta de circuito y terminal, del 26 de Abril de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un conjunto de tarjeta de circuito que comprende: una tarjeta de circuito que tiene un primer lado y un segundo lado opuesto al primer lado ; […]
Técnicas para enfocar automáticamente una cámara digital, del 30 de Enero de 2019, de QUALCOMM INCORPORATED: Un dispositivo electrónico móvil que comprende: un componente de lente acoplado a un componente de posición de lente ; una […]
SISTEMA DE FOTOTRAMPEO PARA ZONAS REMOTAS, CON REDES DE ENERGÍA Y COMUNICACIÓN AUTÓNOMAS, del 21 de Junio de 2018, de AXIS INGENIERÍA, S.A. DE C.V: Un sistema de fototrampeo automático para ser ubicado en zonas remotas de difícil acceso, con red de suministro de energía renovable y red de […]