Aparato para controlar armónicos de par en convertidores PWM y procedimientos relacionados.
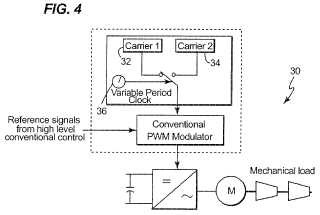
Procesador PWM (30), que comprende:
una unidad moduladora (14) para generar una señal PWM para accionar un sistema mecánico (24);
y una unidad generadora de la señal portadora conectada a una entrada de la señal portadora de la unidad moduladora, estando configurado el generador de la señal portadora para generar una primera y segunda señales portadoras (32, 34), en el que la unidad moduladora genera una señal PWM que corresponde a una señal de referencia suministrada a la misma utilizando alternativamente la primera y segunda señales portadoras, y en el que la primera señal portadora (32) está fuera de fase respecto a la segunda señal portadora (34) para minimizar los armónicos de par indeseables sobre el sistema mecánico, en el que el período de tiempo para usar alternativamente la primera y segunda señales portadoras es pequeño en comparación con la constante de tiempo de un modo torsional del sistema mecánico (27).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07123404.
Solicitante: GENERAL ELECTRIC COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1 RIVER ROAD SCHENECTADY, NY 12345 ESTADOS UNIDOS DE AMERICA.
Inventor/es: SIHLER,CHRISTOF, SCHROEDER,STEFAN, Song,Joseph, Vyas,Parag, Geyer,Tobias.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02P23/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › Disposiciones o métodos para el control de motores de corriente alterna que se caracterizan por un método de control que no sea control por vector.
PDF original: ES-2382477_T3.pdf
Fragmento de la descripción:
Aparato para controlar armónicos de par en convertidores PWM y procedimientos relacionados Las realizaciones descritas se refieren en general a convertidores PWM, y más particularmente a aparatos y procedimientos para controlar los armónicos de par en convertidores PWM.
Los accionadores y los generadores de máquinas están típicamente conectados a un eje mecánico, que puede exhibir resonancia en una o más frecuencias críticas. Si la máquina eléctrica produce un componente de par en una frecuencia crítica tal, entonces las oscilaciones de par se traducirán en el eje, lo que puede conducir a un aumento de la fatiga y reducción de la vida del eje. En los sistemas muy sub-amortiguados, se pueden observar valores de par pico, que pueden conducir directamente a daños del eje. La fuente de los componentes de par pueden ser armónicos de tensión presentes debido a la naturaleza de los moduladores de salida en convertidores de PulsoAnchura-Modulación (en lo sucesivo, PWM) o debido a la presencia de otras alteraciones de corriente o tensión dentro de la red eléctrica en conexión con la máquina. El documento US 20040207360 divulga un control de motor PWM que calcula la frecuencia portadora de la señal PWM sobre la base de la velocidad del motor.
La figura 1 ilustra un modulador PWM 8 convencional utilizado para generar una señal de salida sinusoidal de ejemplo. Tal como se entiende por los expertos, el proceso ilustrado en la figura 1 es sólo ilustrativo y no debe ser considerado limitativo para las diferentes realizaciones aquí descritas de ninguna manera. Tal como se muestra, una señal analógica 10 fundamental, o de referencia, se compara con una o más señales portadoras 12 en un modulador 14 para generar una señal PWM discreta, o secuencia de pulsos, 16. Tal como se muestra en la figura 2, en un sistema de accionamiento PWM convencional 18, el modulador PWM 8 recibe la señal de referencia 10 desde un bloque de control de alto nivel convencional (no mostrado) y procesa la misma para generar las señales PWM discretas 16 que se utilizan para activar y desactivar los conmutadores electrónicos de potencia 20 controlando la potencia eléctrica para accionar un motor 22 conectado a una carga mecánica 24. Para algunos puntos de funcionamiento a una frecuencia de conmutación dada, el par motor aplicado al eje mediante el sistema de accionamiento puede tener algunos componentes armónicos que coinciden con las frecuencias naturales del tren de accionamiento.
La figura 3 muestra un espectro de frecuencia 19 de la señal PWM 16 de las figuras 1 y 2. Tal como se entiende por parte de los expertos y como también se muestra en las figuras 1 y 3, los convertidores de potencia electrónicos basados en dispositivos de conmutación generan tensiones en niveles discretos. Además de una señal de tensión deseada 20 a una frecuencia fundamental, componentes armónicos no deseados 22 también están presentes. Estos armónicos pueden llevar a requisitos de calificaciones más altas de los componentes eléctricos, pérdidas aumentadas en la maquinaria eléctrica, y tiempos de vida reducidos en motores y generadores o en ejes mecánicos en los sistemas de accionamiento de máquinas. Lo más importante, mediante la excitación de los modos propios de este sistema mecánico, estos armónicos pueden conducir a inestabilidades de resonancia y disparos de emergencia del accionamiento. En general, las frecuencias armónicas puede ser relativamente altas, y filtros pasivos se pueden utilizar para atenuar las amplitudes. Sin embargo, armónicos de frecuencias menores, también denominados armónicos de batido o frecuencias de batido, también pueden estar presentes y son más difíciles de reducir con filtros pasivos, ya que están más cerca de la anchura de banda de tensión requerida. Estas frecuencias de batido pueden conducir a daños graves en el caso de que los sistemas de accionamiento de la máquina estén subamortiguados y donde la frecuencia de resonancia del eje mecánico esté próxima a la de los armónicos de la frecuencia de batido. Estos componentes de batido pueden producirse a frecuencias por encima y por debajo de la frecuencia fundamental. Muchos convertidores operan con una estrategia síncrona de PWM, donde la frecuencia del portador es un múltiplo entero fijo de la frecuencia fundamental de salida del convertidor. Sin embargo, esto no es deseable cuando se opera a bajas frecuencias fundamentales, ya que la frecuencia de conmutación está limitada a valores bajos que conducen a pobres rendimientos armónicos.
En los sistemas de potencia en los que la cantidad de energía generada es relativamente pequeña en comparación con las cargas mecánicas y poca inercia rotacional existe en los generadores relativos a las cargas, incluso pequeñas perturbaciones, tales como armónicos de par generados por grandes convertidores PWM, pueden causar interacciones electromecánicas con el conjunto del eje del rotor de los generadores, lo que afecta a la fiabilidad global del sistema. Esta interacción electromecánica también puede verse en grandes convertidores PWM que accionan trenes de alta potencia a velocidad variable, por ejemplo, trenes de transmisión de compresores. Tal como se entiende por los expertos, la identificación y la eliminación de sólo pequeñas perturbaciones causan problemas de torsión que pueden consumir tiempo y ser costosos.
Contramedidas convencionales a los problemas anteriormente citados se basan en el aumento de la frecuencia de armónicos de par de bajo orden (por ejemplo, aumentando la frecuencia de conmutación del convertidor) o disminuyendo su amplitud (por ejemplo, mediante topologías de convertidores de múltiples niveles) . Es decir, las contramedidas convencionales contra los problemas de resonancia de torsión se basan en la eliminación de la fuente de excitación de resonancia, por ejemplo, cambiando la red, los parámetros operativos o de control (de modo que el espectro de par se cambia) . En los sistemas de potencia con accionamientos de gran velocidad variable, las dinámicas mecánicas y eléctricas están cada vez más acopladas (con calificación creciente de los motores eléctricos y la complejidad del sistema de potencia) , haciendo así más difíciles de suprimir las oscilaciones de par sólo mediante las contramedidas convencionales. Por ejemplo, cuando se cambia el espectro de par del convertidor, otros puntos de resonancia existentes en la red todavía puede ser excitados, especialmente cuando la frecuencia de los armónicos de par varía con la velocidad de un accionamiento de velocidad variable (en lo sucesivo, VSD) .
Otra contramedida convencional contra los problemas de torsión es reducir la amplitud de los armónicos de par individuales de baja frecuencia mediante bucles de control dentro del sistema de control de accionamiento. Si existe una medición del par mecánico (o un observador fiable para el par) , los problemas de par también pueden suprimirse mediante una amortiguación de modo torsional activa. Todos estos procedimientos requieren un análisis detallado del sistema total, un diseño del sistema de control y la disponibilidad de las señales de entrada procedentes de sensores que controlan con precisión la dinámica del sistema del eje del rotor del sistema de accionamiento respectivo. A pesar de que un control activo de armónicos de orden bajo del par o un control de amortiguación activo puede encontrarse en la literatura, tales sistemas no son estado de la técnica para la mayoría de grandes accionamientos existentes debido a la realización de estas contramedidas es difícil. Más comúnmente, por lo tanto, se trata el enfoque para evitar problemas de par realizando convertidores PWM de baja magnitud del par pulsante a la frecuencia fundamental. Pero esto requiere topologías de convertidor complejas o altas frecuencias de conmutación, lo que resulta en sistemas caros y/o una fiabilidad global reducida.
Sin embargo, otra contramedida técnica convencional puede compararse para la eliminación selectiva de armónicos donde los patrones de pulsos PWM están optimizados directamente fuera de línea para los patrones de conmutación síncrona. Esta se incorpora en accionamientos de media tensión y se implementa sólo a patrones de conmutación síncrona. La frecuencia fundamental e incluso la frecuencia portadora PWM puede cambiar. Esta técnica puede aplicarse en línea con un ajuste a la señal de referencia. Además, existen otros procedimientos de cambio de fase portadora y la frecuencia de una manera determinista o aleatoria. Sin embargo, estos procedimientos no eliminan los armónicos, sino que se basan en el hecho de que, aunque los armónicos críticos pueden existir en muchos... [Seguir leyendo]
Reivindicaciones:
1. Procesador PWM (30) , que comprende:
una unidad moduladora (14) para generar una señal PWM para accionar un sistema mecánico (24) ; y una unidad generadora de la señal portadora conectada a una entrada de la señal portadora de la unidad moduladora, estando configurado el generador de la señal portadora para generar una primera y segunda señales portadoras (32, 34) , en el que la unidad moduladora genera una señal PWM que corresponde a una señal de referencia suministrada a la misma utilizando alternativamente la primera y segunda señales portadoras, y en el que la primera señal portadora (32) está fuera de fase respecto a la segunda señal portadora (34) para minimizar los armónicos de par indeseables sobre el sistema mecánico, en el que el período de tiempo para usar alternativamente la primera y segunda señales portadoras es pequeño en comparación con la constante de tiempo de un modo torsional del sistema mecánico (27) .
2. Procesador PWM (30) según la reivindicación 1, en el que la unidad moduladora (14) genera la señal PWM sin ninguna señal de realimentación desde el sistema mecánico.
3. Procesador PWM (30) según cualquier reivindicación anterior, que comprende:
una unidad de perturbación conectada a la entrada de la señal de referencia de la unidad moduladora, y una unidad de predicción del componente de frecuencia de batido conectada a la unidad de perturbación, en el que un componente de frecuencia de la señal de referencia suministrada a la unidad de perturbación correspondiente a una frecuencia de batido del sistema mecánico se elimina mediante la adición a la señal de referencia de una señal de perturbación producida por la unidad de perturbación sobre la base de los cálculos realizados por la unidad de predicción del componente de frecuencia de batido, de manera que la frecuencia de batido del sistema mecánico no es excitada por la señal PWM producida por la unidad moduladora.
4. Procedimiento de generación de una señal PWM, comprendiendo el procedimiento:
generar la señal PWM basada en una señal de referencia y una primera señal portadora (32) , y después de un período de tiempo, generar alternativamente la señal PWM basada en la señal de referencia y una segunda señal portadora (34) , en el que la primera señal portadora está fuera de fase respecto a la segunda señal portadora y el período de tiempo es menor que la constante de tiempo de un modo torsional de un sistema mecánico (24) accionado por la señal PWM, para minimizar los armónicos de par indeseables del sistema mecánico.
5. Procedimiento según la reivindicación 4, en el que el período de tiempo es variable.
6. Procedimiento según la reivindicación 4 o la reivindicación 6, que comprende:
calcular un componente de frecuencia de batido del sistema mecánico basado en una frecuencia de salida fundamental y la frecuencia de una señal portadora (12) ; añadir a la señal de referencia una señal de perturbación basada en el componente de frecuencia de batido calculado, y generar la señal PWM de tal manera que una frecuencia de batido de un sistema mecánico accionado por la señal PWM no es excitada.
7. Procedimiento según la reivindicación 6, en el que la señal de perturbación es una forma de onda sinusoidal que tiene una frecuencia sustancialmente igual a la frecuencia de batido, una magnitud sustancialmente igual a la magnitud del componente de frecuencia de batido, y un ángulo de fase sustancialmente desplazado en 180º a partir de un ángulo de fase del componente de frecuencia de batido.
Patentes similares o relacionadas:
Método para controlar un inversor, del 6 de Mayo de 2020, de LSIS Co., Ltd: Un método para controlar un inversor que realiza una optimización de salida de un motor en una sección por encima de la velocidad […]
Accionadores de válvula, del 26 de Febrero de 2020, de Eaton Intelligent Power Limited: Un accionador de válvula que incluye: un vástago de impulsión para, en uso, ajustar una válvula entre una posición de apertura y una posición de cierre; […]
Procedimiento y dispositivo de regulación y/o control para el funcionamiento de una instalación de energía eólica y/o de un parque, así como instalación de energía eólica y parque eólico, del 16 de Octubre de 2019, de Wobben Properties GmbH: Procedimiento para el funcionamiento de una instalación de energía eólica y/o de un parque eólico para la inyección de potencia eléctrica a una red de alimentación […]
 Dispositivo de generación hidroeléctrica de almacenamiento por bombeo de velocidad variable, del 26 de Junio de 2019, de Hitachi Mitsubishi Hydro Corporation: Un aparato de generación de potencia de almacenamiento por bombeo de velocidad variable que comprende un motor de generador de velocidad variable que […]
Dispositivo de generación hidroeléctrica de almacenamiento por bombeo de velocidad variable, del 26 de Junio de 2019, de Hitachi Mitsubishi Hydro Corporation: Un aparato de generación de potencia de almacenamiento por bombeo de velocidad variable que comprende un motor de generador de velocidad variable que […]
Procedimiento de identificación de la resistencia eléctrica del rotor de un motor eléctrico, del 12 de Junio de 2019, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de identificación de un valor (Rr) de resistencia de un rotor de motor (M) eléctrico de inducción, caracterizado porque comprende las etapas […]
Sistema de control de motor eléctrico de inducción, del 8 de Mayo de 2019, de LSIS Co., Ltd: Un sistema para controlar un motor electrico de induccion en una region de alta velocidad por encima de una velocidad nominal predeterminada, […]
Método para detectar el estado de un cable de alimentación en un sistema inversor, del 3 de Abril de 2019, de LSIS Co., Ltd: Un metodo para detectar los estados de los cables de alimentacion en un sistema inversor que suministra energia generada a partir de un inversor a […]
Aparato para controlar un motor de inducción, del 27 de Febrero de 2019, de LSIS Co., Ltd: Un aparato para controlar una máquina de inducción en un sistema que incluye una primera unidad de determinación configurada para determinar una tensión […]